载入中...
搜索中...
未找到
roboctrl::device::dji_motor类 参考
DJI 系列电机。 更多...
详细描述
#include <dji.h>
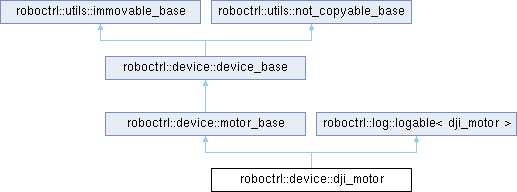
类 roboctrl::device::dji_motor 继承关系图:
类 | |
| struct | info_type |
| 电机初始化参数。 更多... | |
Public 类型 | |
| enum | type { M2006 = 2006 , M3508 = 3508 , M6020 = 6020 } |
额外继承的成员函数 | |
 Protected 成员函数 继承自 roboctrl::log::logable< dji_motor > Protected 成员函数 继承自 roboctrl::log::logable< dji_motor > | |
| void | log (log_level level, std::format_string< Args... > fmt, Args &&...args) const |
| 输出日志 | |
| void | log_debug (std::format_string< Args... > fmt, Args &&...args) const |
| 输出debug日志 | |
| void | log_info (std::format_string< Args... > fmt, Args &&...args) const |
| 输出info日志 | |
| void | log_warn (std::format_string< Args... > fmt, Args &&...args) const |
| 输出warn日志 | |
| void | log_error (std::format_string< Args... > fmt, Args &&...args) const |
| 输出error日志 | |
| Protected 属性 继承自 roboctrl::device::motor_base | |
| float | angle_ {} |
| float | angle_speed_ {} |
| float | torque_ {} |
| float | radius_ {} |
| Protected 属性 继承自 roboctrl::device::device_base | |
| const std::chrono::nanoseconds | offline_timeout_ |
| 设备离线超时时间 | |
| std::chrono::nanoseconds | tick_time_ |
| 上次心跳时间 | |
| bool | terminated_ = false |
成员枚举类型说明
◆ type
构造及析构函数说明
◆ dji_motor()
| dji_motor::dji_motor | ( | dji_motor::info_type | info | ) |
成员函数说明
◆ current()
◆ desc()
◆ enable()
◆ set()
| roboctrl::awaitable< void > dji_motor::set | ( | fp32 | speed | ) |
设置目标电流或速度(取决于电调模式)。
引用了 roboctrl::log::logable< dji_motor >::log_debug() , 以及 roboctrl::utils::pid_base< T, error_measurer >::set_target().
◆ task()
| roboctrl::awaitable< void > dji_motor::task | ( | ) |
该类的文档由以下文件生成: