载入中...
搜索中...
未找到
roboctrl::device::device_base结构体 参考
设备基础类,提供判断设备离线的基础功能 更多...
详细描述
设备基础类,提供判断设备离线的基础功能
这个类主要提供判断设备是否离线的功能,设备离线的判断是基于心跳机制实现的。
设备类应当继承自这个类,并在适当的时候调用tick()方法来更新心跳时间。 如果设备在指定的离线超时时间内没有收到心跳,则认为设备离线。
#include <base.hpp>
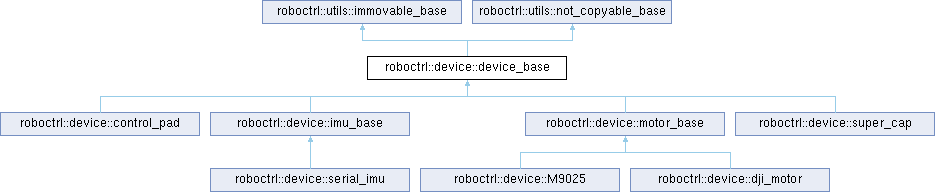
类 roboctrl::device::device_base 继承关系图:
Public 成员函数 | |
| device_base (const std::chrono::nanoseconds offline_timeout) | |
| bool | offline () |
| 判断设备是否离线 | |
| void | tick () |
| 更新心跳时间 | |
| awaitable< void > | task () |
| 默认的task | |
 Public 成员函数 继承自 roboctrl::utils::immovable_base Public 成员函数 继承自 roboctrl::utils::immovable_base | |
| immovable_base (immovable_base &&)=delete | |
| immovable_base & | operator= (immovable_base &&)=delete |
| Public 成员函数 继承自 roboctrl::utils::not_copyable_base | |
| not_copyable_base (const not_copyable_base &)=delete | |
| not_copyable_base & | operator= (const not_copyable_base &)=delete |
Protected 属性 | |
| const std::chrono::nanoseconds | offline_timeout_ |
| 设备离线超时时间 | |
| std::chrono::nanoseconds | tick_time_ |
| 上次心跳时间 | |
| bool | terminated_ = false |
构造及析构函数说明
◆ device_base()
| roboctrl::device::device_base::device_base | ( | const std::chrono::nanoseconds | offline_timeout | ) |
成员函数说明
◆ offline()
|
inline |
◆ task()
◆ tick()
|
inline |
类成员变量说明
◆ offline_timeout_
|
protected |
◆ terminated_
◆ tick_time_
|
protected |
初始值:
上次心跳时间
该结构体的文档由以下文件生成: