载入中...
搜索中...
未找到
roboctrl::device::serial_imu类 参考
详细描述
在文件 serial_imu.hpp 第 6 行定义.
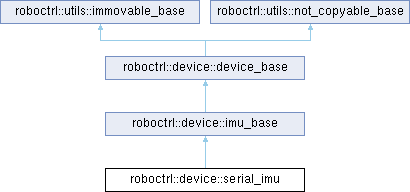
类 roboctrl::device::serial_imu 继承关系图:
类 | |
| struct | info_type |
Public 成员函数 | |
| std::string | desc () const |
| serial_imu (const info_type &info) | |
 Public 成员函数 继承自 roboctrl::device::imu_base Public 成员函数 继承自 roboctrl::device::imu_base | |
| auto | acc () const |
| 获取三轴加速度。(rad/s^2) | |
| auto | gyro () const |
| 获取三轴角速度。(rad/s) | |
| auto | angle () const |
| 获取欧拉角。(rad) | |
| fp32 | acc (const axis axis) const |
| 指定轴的加速度。 | |
| fp32 | gyro (const axis axis) const |
| 指定轴的角速度。 | |
| fp32 | angle (const axis axis) const |
| 指定轴的欧拉角。 | |
| imu_base (const std::chrono::nanoseconds offline_timeout) | |
| Public 成员函数 继承自 roboctrl::device::device_base | |
| device_base (const std::chrono::nanoseconds offline_timeout) | |
| bool | offline () |
| 判断设备是否离线 | |
| void | tick () |
| 更新心跳时间 | |
| awaitable< void > | task () |
| 默认的task | |
| Public 成员函数 继承自 roboctrl::utils::immovable_base | |
| immovable_base (immovable_base &&)=delete | |
| immovable_base & | operator= (immovable_base &&)=delete |
| Public 成员函数 继承自 roboctrl::utils::not_copyable_base | |
| not_copyable_base (const not_copyable_base &)=delete | |
| not_copyable_base & | operator= (const not_copyable_base &)=delete |
额外继承的成员函数 | |
| Protected 属性 继承自 roboctrl::device::imu_base | |
| std::array< fp32, 3 > | acc_ {} |
| std::array< fp32, 3 > | gyro_ {} |
| std::array< fp32, 3 > | angle_ {} |
| Protected 属性 继承自 roboctrl::device::device_base | |
| const std::chrono::nanoseconds | offline_timeout_ |
| 设备离线超时时间 | |
| std::chrono::nanoseconds | tick_time_ |
| 上次心跳时间 | |
| bool | terminated_ = false |
构造及析构函数说明
◆ serial_imu()
在文件 serial_imu.cpp 第 18 行定义.
成员函数说明
◆ desc()
|
inline |
在文件 serial_imu.hpp 第 19 行定义.
该类的文档由以下文件生成:
- /home/runner/work/GKD.RoboCtrl/GKD.RoboCtrl/include/device/imu/serial_imu.hpp
- device/imu/serial_imu.cpp