载入中...
搜索中...
未找到
roboctrl::io::serial类 参考
串口设备对象。 更多...
详细描述
#include <serial.h>
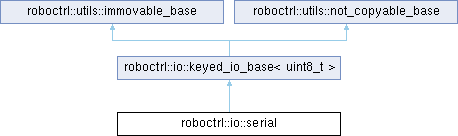
类 roboctrl::io::serial 继承关系图:
类 | |
| struct | info_type |
| 串口初始化参数。 更多... | |
Public 类型 | |
| using | key_type = std::uint8_t |
Public 成员函数 | |
| serial (info_type info) | |
| 打开并配置串口。 | |
| awaitable< void > | send (key_type key, byte_span data) |
| 发送字节数据。 | |
| awaitable< void > | task () |
| 接收循环任务。 | |
| std::string | desc () const |
 Public 成员函数 继承自 roboctrl::io::keyed_io_base< uint8_t > Public 成员函数 继承自 roboctrl::io::keyed_io_base< uint8_t > | |
| void | on_data (const uint8_t &key, callback_fn< byte_span > auto fn, size_t size=0) |
| 注册指定 key 的回调。 | |
| void | on_data (const uint8_t &key, Fn &&fn) |
| 注册平凡类型包的回调。 | |
| Public 成员函数 继承自 roboctrl::utils::immovable_base | |
| immovable_base (immovable_base &&)=delete | |
| immovable_base & | operator= (immovable_base &&)=delete |
| Public 成员函数 继承自 roboctrl::utils::not_copyable_base | |
| not_copyable_base (const not_copyable_base &)=delete | |
| not_copyable_base & | operator= (const not_copyable_base &)=delete |
额外继承的成员函数 | |
| Protected 成员函数 继承自 roboctrl::io::keyed_io_base< uint8_t > | |
| void | dispatch (const uint8_t &key, byte_span data) |
| 将数据派发给对应 key 的回调。 | |
| size_t | package_size (const uint8_t &key) |
成员类型定义说明
◆ key_type
构造及析构函数说明
◆ serial()
|
explicit |
打开并配置串口。
在文件 serial.cpp 第 15 行定义.
成员函数说明
◆ desc()
◆ send()
| roboctrl::awaitable< void > serial::send | ( | key_type | key, |
| byte_span | data | ||
| ) |
发送字节数据。
在文件 serial.cpp 第 30 行定义.
◆ task()
| roboctrl::awaitable< void > serial::task | ( | ) |
该类的文档由以下文件生成:
- /home/runner/work/GKD.RoboCtrl/GKD.RoboCtrl/include/io/serial.h
- io/serial.cpp