载入中...
搜索中...
未找到
roboctrl::ctrl::gimbal类 参考
云台主控制器单例。 更多...
详细描述
#include <gimbal.h>
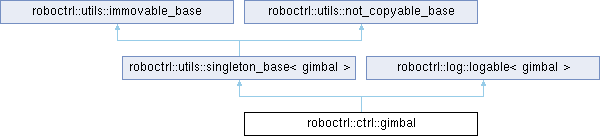
类 roboctrl::ctrl::gimbal 继承关系图:
类 | |
| struct | info_type |
| 初始化参数。 更多... | |
Public 成员函数 | |
| std::string | desc () const |
| fp32 | yaw () const |
| void | set_yaw (fp32 yaw) |
| bool | init (const info_type &info) |
| 初始化云台资源与控制器。 | |
| awaitable< void > | task () |
| 主循环任务,负责刷新控制器。 | |
 Public 成员函数 继承自 roboctrl::utils::singleton_base< gimbal > Public 成员函数 继承自 roboctrl::utils::singleton_base< gimbal > | |
| singleton_base (const singleton_base &)=delete | |
| singleton_base & | operator= (const singleton_base &)=delete |
| Public 成员函数 继承自 roboctrl::utils::immovable_base | |
| immovable_base (immovable_base &&)=delete | |
| immovable_base & | operator= (immovable_base &&)=delete |
| Public 成员函数 继承自 roboctrl::utils::not_copyable_base | |
| not_copyable_base (const not_copyable_base &)=delete | |
| not_copyable_base & | operator= (const not_copyable_base &)=delete |
额外继承的成员函数 | |
| 静态 Public 成员函数 继承自 roboctrl::utils::singleton_base< gimbal > | |
| static gimbal & | instance () |
| 获取单例实例 | |
| Protected 成员函数 继承自 roboctrl::log::logable< gimbal > | |
| void | log (log_level level, std::format_string< Args... > fmt, Args &&...args) const |
| 输出日志 | |
| void | log_debug (std::format_string< Args... > fmt, Args &&...args) const |
| 输出debug日志 | |
| void | log_info (std::format_string< Args... > fmt, Args &&...args) const |
| 输出info日志 | |
| void | log_warn (std::format_string< Args... > fmt, Args &&...args) const |
| 输出warn日志 | |
| void | log_error (std::format_string< Args... > fmt, Args &&...args) const |
| 输出error日志 | |
成员函数说明
◆ desc()
◆ init()
初始化云台资源与控制器。
在文件 gimbal.cpp 第 15 行定义.
引用了 roboctrl::log::logable< gimbal >::log_info(), roboctrl::async::spawn() , 以及 task().
◆ set_yaw()
◆ task()
| roboctrl::awaitable< void > gimbal::task | ( | ) |
◆ yaw()
该类的文档由以下文件生成:
- /home/runner/work/GKD.RoboCtrl/GKD.RoboCtrl/include/ctrl/gimbal.h
- ctrl/gimbal.cpp